

A Review of Physical Infrastructure Design Methods for Dedicated Lane for Connected and Autonomous Vehicles on Highway
-
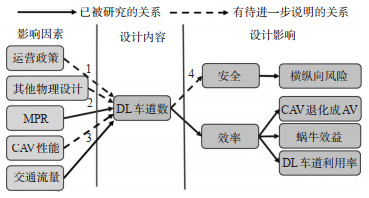
摘要: 为深入探究网联自动驾驶专用车道的物理基础设施设计对交通性能的影响,从专用车道的部署条件、专用车道的接入方式、以及专用车道与普通车道的分隔方式等3个方面进行梳理,明确了现有研究的理论基础与实践进展,构建了这些方面对交通系统性能的影响关系框架,并指出了当前研究中存在的空白和未来研究的发展方向。结果表明:目前对网联自动驾驶专用车道部署条件的研究主要聚焦在交通效率上,缺少对交通安全的评估,且不同的研究假设导致了研究结果的差异,在未来研究中需要对部署条件进行精确评估;有关接入方式的研究则显示常规的自由接入和有限接入各有优势,但2种接入方式的优势条件有待进一步检验,建议借鉴高载客率车辆(high occupancy vehicle,HOV)专用车道接入方式的设计,在网联自动驾驶专用车道场景下对其进行重新评估;有关分隔方式的研究显示需要确认网联自动驾驶专用车道与普通车道的分隔方式对人类驾驶员适应性行为的影响,以确保驾驶者能够有效适应专用车道的部署。总体而言,目前研究虽有一定进展,但由于缺乏实际的道路案例与部署效果验证,基于仿真的方法由于假设等方面的差异使得研究结论有较大的分歧。未来的研究应重点聚焦在网联自动驾驶行为的精确化、横纵向对比研究、以及量化网联自动驾驶专用车道设计对安全效率的影响等方向进行改进。
-
关键词:
- 道路设计 /
- 网联自动驾驶专用车道 /
- 物理基础设施 /
- 交通安全与效率 /
- 网联自动驾驶
Abstract: To thoroughly explore the impacts of the physical infrastructure design of dedicated lanes (DL) for Connected and autonomous vehicle (CAV) on traffic performances, this paper systematically sorted out the ongoing progress in three domains, namely, DL deployment conditions, DL access types, and separation types between DL and general-purpose lanes. It clarifies the theoretical foundations and practical advancements of existing research, constructing a framework that outlines the relationship between physical infrastructure and traffic system performance, and such endeavor has shed light on the research gaps and future direction in this regard. The results indicate that current studies on DL deployment conditions primarily focus on traffic efficiency, while assessments of traffic safety are relatively lacking. Divergent conclusions in existing research stem from different assumptions, thus demanding more precise evaluations of DL deployment conditions in future research. Concerning the access types, both limited access and continuous access have their advantages, yet the embodiment conditions of such advantages require further validation. The design of high occupancy vehicle (HOV) lane access types can also be used for re-evaluation in the scenario of DL. It is essential to ascertain how the separation methods between DL and regular lanes affect the adaptability of human drivers, ensuring their effective adjustment to DL deployment. In general, although some progress has been made in current research, the lack of real-world cases and actual deployment effect verification means that simulation-based methods often yield varying conclusions due to differences in assumptions and other factors. Future research should focus on accurately describing CAV behavior, conducting longitudinal and cross-sectional comparison studies, and quantifying the impact of DL design on safety and efficiency to make improvements. -

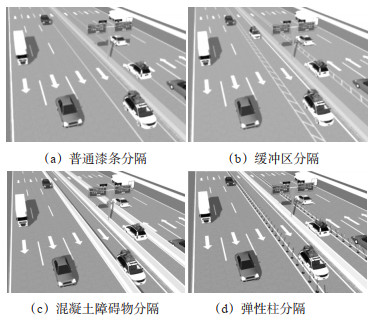
图 6 DL与普通车道的分隔方式设计条件关系图
Figure 6. Diagram of design conditions for types of separation between DL and general purpose lane
表 1 DL设置条件研究
Table 1. Research on DL deployment conditions
相关文献 对比内容 道路条件 仿真设置/研究方法 主要结论 布设建议 文献[14] MPR、交通密度、CAV性能对道路通行量的影响 单向3车道,虚拟道路 模型:改进的元胞自动机模型。
密度范围:0~130 veh/km
实验1:车头时距(time headway,THW)为0.5 s,0.8 s,1.1 s,CAV与MV的最大速度97.2 km/h;
实验2:专用车道上最大车速为120 km/h,普通车道最大车速为95 km/h时①DL仅能在一定流量(同步流)中提升通行量;②低交通密度情况下,无论MPR如何变化,设置专用道几乎没有提升效率,甚至有负面影响;③CAV的性能、限速政策是影响MPR阈值的因素 ① MPR为30% ~50%:部署1条DL;②MPR>50%:部署2条DL 文献[6] MPR对道路通行量的影响 单向3车道,虚拟道路 仿真软件:Plexe
CAV行驶参数:CTG控制器汽车跟随模型;CACC THW:0.5 s
MV跟驰模型:Krauss car-following model。
期望速度:100 km/h①MPR<30%:不建议设置DL;②MPR为30% ~50%:部署1条DL;③ MPR>50%:部署2条DL 文献[13] MPR、交通密度对道路通行量的影响 单向4车道,虚拟道路 模型:改进的元胞自动机模型
仿真软件:MATLAB
人工驾驶跟驰模型:KKW
最大速度:108 km/h
MPR:0~90%(间隔5%)
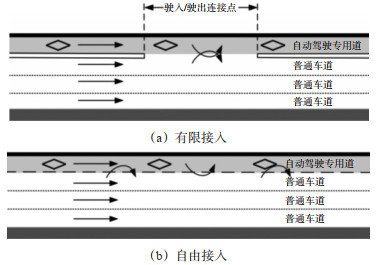
密度范围:0~130 veh/km①在自由流阶段,是否部署专用道、MPR变化对道路通行量影响不大;②高MPR显著改善了混合交通流的通行量,此时是否布设DL对通行量并无明显影响 ① MPR为10% ~ 40%:用DL代替效率不佳的HOV车道;②MPR为50%~90%:部署2条DL;③ MPR>90%:不建议设置DL 文献[15] MPR、DL接入方式对道路通行量的影响 单向4车道,基于现实道路(I-66州际高速公路) 仿真软件:PTV-VISSIM
假设:CAV车辆试图进入CACC车道时,可能会对CACC车队造成干扰交通量:1 000~1 600veh/h
接入方式:有限接入和自由接入①DL的连接设计会对道路通行量有影响;②能提升通行量的MPR阈值:有限接入22%;自由接入26% ①MPR<30%:不建议设置DL;② MPR>30%:部署1条DL 文献[16] MPR与社会效益的关系 单向4车道,基于现实道路(江苏省某段高速公路 成本效益分析法:因素包含安全、排放、噪声、设备成本和燃料消耗的影响。将每个因素的价值货币化,从而计算出每个情景的净现值 ①MPR>15.5%时,部署1条DL净现值为正;②MPR>46.1%时,部署2条DL净现值为正 文献[17] MPR、CAV行驶参数对旅行时间、车辆行驶里程、平均速度和道路通行量的影响 单向4车道,基于现实道路(I-95洲州际高速) 仿真软件:CORMAC
THW:0.7,0.5,0.3 s部署DL的MPR阈值会因为CAV性能变化而产生变 MPR为30%~50%时,布设1条专用道有益,具体阈值取决于CAV性能。 文献[18] MPR、交通需求、卡车比例对交通安全性的影响 单向4车道,基于现实道路(江苏省宁湖高速公路) 仿真软件:PTV-VISSIM
安全性评价软件:SSAM
MPR:0%~30%(间隔10%)
交通需求:2 000、4 000、6 000、8 000 veh/h
卡车比例:0~30%(间隔10%)
运用纵向和横向安全风险指标在内的4种替代安全措施评价设置专用车道的总体安全影响①卡车的存在恶化了整体的纵向安全环境;②随着卡车比例的增加,DL与普通车道的速度差增大,DL的安全性优势会进一步体现;③DL一般只在中高流量中提升交通安全性 ①MPR<10%:设置DL会导致整体更高的事故风险;② MPR>15%:设置DL可以降低整体事故风险 文献[19] 对交通安全的影响 基于现实道路(佛罗里达SR408高速公路) 仿真软件:PTV-VISSIM
安全性评价软件:SSAM
场景设置:①无CAV;②有CAV,全车道都可以队列行驶;③有CAV,仅能在DL队列行驶对于速度标准差、追尾风险指数、侧面撞击风险指数等安全指标,场景3优于场景2,场景2优于场景1 文献[20] MPR对交通效率、安全、燃油消耗的关系 基于现实道路(弗吉尼亚北I-66道路和加州圣马特奥县的US-101) 仿真软件:PTV-VISSIM ①MPR<10%:建议与HOV车辆共享DL;②MPR为20%~45%:部署1条DL;③MPR>50%:不建议设置DL  下载: 导出CSV
下载: 导出CSV
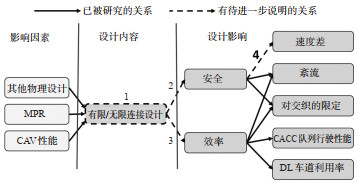
表 2 接入方式对交通安全和效率的影响的研究
Table 2. Research on the impact of access type on traffic safety and efficiency
相关文献 对比条件 仿真设置 主要结论 文献[20] ①接入方式:有限接入、自由接入;② CAV驾驶应用:CACC、CACC+动态速度协调(dynamicspeed harmonization,DSH) 仿真软件:PTV-VISSIM
仿真路段:弗吉尼亚北I-66道路
主要仿真假设:有限接入会限制短途出行的CAV使用DL,从而更多的CAV退化为AV并使得普通车道更加拥挤。
MPR:25%
流量:900~2 100 vph,各路段不同①普通车道的旅行时间:使用CACC时,有限接入情况下减少,自由接入情况下增加;使用CACC+DSH时,有限接入情况下增加。②道路通行量:使用CACC时,有限接入减少6%,自由接入提高8%;使用CACC+DSH时,2种接入方式几乎没有差异。③CAV和普通车道的速度差:使用CACC时,有限接入下的CAV速度比普通车道高46%,自由接入下的CAV速度比普通车辆高42%;使用CACC+DSH时,自由接入的速度差更大。④平均速度差与MPR的关系:MPR 25%时,平均速度差为16~24 km/h;MPR 10%时,平均速度差为56 km/h 文献[15] 接入方式:有限接入、自由接入 仿真软件:PTV-VISSIM
仿真路段:I-66州际高速公路1段8 km的道路
MPR:10~50%
CAV驾驶应用:CACC
流量:1 000~1 600 vph
主要仿真假设:CAV驶入DL时,会对DL上的行驶中的CACC车队有干扰,CACC队可能被分解成2个子队或完全解散①在交通需求较大的情况下,有限接入能大大提高CACC的性能,从而提高了道路的通行量;②道路通行量:在MPR范围为10~40%,有限接入总是比自由接入表现更好。仅当MPR达到45%时,自由接入在网络通行量上优于有限接入;③速度差:有限接入优于自由接入,一定程度上意味着在安全性方面有限接入优于自由接入,尤其是在MPR为40%~50%时;④旅行时间:在任何MPR下,有限接入均优于自由接入
下载: 导出CSV
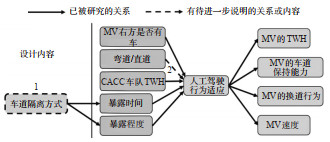
表 3 MV 在 CAV 队列旁行驶而产生适应性行为的研究
Table 3. Research on behavioural adaptation of MV drivers when they drive next to a platoon of CAVs
相关文献 研究内容 研究条件 研究结论、发现 文献[44] 队列行驶的车队对人工驾驶行为(跟车距离、可接受的换道车距等)的影响 方法:驾驶人操作驾驶模拟器
道路条件:自由接入,普通标线分隔
CAV车型:小汽车
对比情景:①无专用道,道路全部为人工驾驶;②无专用道,道路上有2~3个CAV组成的CAV队列;③有专用道,有2~3个CAV组成的CAV队列在专用道中行驶1)对比情景①和情景②,人工驾驶行为没有显著差异。意味在混合交通流中,人工驾驶几乎不会变化
2)相比于情景①和②,情景③中,在DL相邻车道行驶的MV的平均车头时距更短、平均MV可接受的换道车距缩短了12.7%
3)适应性行为表现与性格、受教育程度、年龄有关文献[48] 研究不同接入方式、分隔设计的DL对人工驾驶行为的影响 方法:驾驶人操作驾驶模拟器
CAV车型:小汽车
对比情景:①无CAV;②自由接入的DL,单车道线分隔;③有限接入的DL,单车道线分隔;④有限接入的DL,混凝土分隔1)专用车道与普通车道之间的间隔类型对MV
的驾驶行为有影响2)适应性行为对MV的影响是短期的
3)车道分隔物挡住了MV司机对CACC队列
的视线,因此降低了适应性行为的程度4)适应性行为的表现与性别、驾驶风格有关
情景①:平均MV THW为3.24 s
情景②:平均MV THW为2.47 s
情景③:平均MV THW为2.69 s
情景④:平均MV THW为3.17 s文献[47] CACC车头时距对人工驾驶行为的影 方法:驾驶人操作驾驶模拟器
道路条件:自由接入,普通标线分隔
CAV车型:大型卡车
对比情景:①无CAV队列;②DL中CACC队列THW为0.3 s;③DL中CACC队列THW为1.4 s适应性行为对MV的影响是短期的,若脱离了CACC的影响,MV驾驶行为就能很快地恢复
情景①:平均MV THW为3.40 s
情景②:平均MV THW为1.87 s
情景③:平均MV THW为1.99 s文献[21] DL宽度、驾驶人性别、CAV THW、交通情况对人工驾驶行为的影响 方法:驾驶人操作驾驶模拟器
道路条件:圣地亚哥15号州际公路智能道路,自由接入,普通标线分隔
CAV车型:小汽车
对比条件:①DL宽度:2.7 m宽、3.6 m宽;②CACC队列THW:1 s、3 s;③交通情况:MV的右方存在车辆通行、MV的右方不存在车辆通行1)MV的右侧车道(普通车道)是否出现车辆、CACC队列行驶的车头时距、DL宽度、性别对MV的适应性行为(车辆在车道中的位置、速度)程度有影响
2)相对于3.6 m宽的DL,MV在2.7 m宽DL旁行驶时,会向DL方向偏移更多
3)2.7 m宽的DL下,MV速度范围更大,速度变化更加频繁
4)CACC THW越小,MV越倾向于远离DL
5)若右侧车道存在交通流,导致DL相邻车道的MV更多地向左侧(专用道位置)偏移
下载: 导出CSV
-
[1] RAZMI RAD S, FARAH H, TAALE H, et al. Design and operation of dedicated lanes for connected and automated vehicles on motorways: a conceptual framework and research agenda[J]. Transportation Research Part C: Emerging Technologies, 2020, 117. [2] LYTRIVIS P, MANGANIARIS S, PAGLE K, et al. Inframix plan for systems interaction, integration and testing[R]. Vienna: INFRAMIX, 2019. [3] JOHNSON C. Readiness of the road Network[R]. London: Royal Automobile Club Foundation for Motoring, 2017. [4] GHANIPOOR S. Safety impact evaluation of a narrow automated vehicle-exclusive reversible lane on an existing smart freeway[R]. Virginia: Safe-D National UTC, 2021. [5] OAKES L, TRICKER J, DAWN A, et al. Roads for the futurededicated driverless spaces[R]. Exeter: City Science, 2018. [6] ZHU H, ZHU X, XU Z, et al. An experimental method for cav dedicated lane setting strategy[C], 2020: 59-66. [7] BLYTHE P, BOX S, HOOSE N, et al. Research on the impacts of connected and autonomous vehicles(cavs)on traffic flow, stage 1: evidence review[R]. Montreal: Atkins L, 2016. [8] 李克强, 李家文, 常雪阳, 等. 智能网联汽车云控系统原理及其典型应用[J]. 汽车安全与节能学报, 2020, 11(3): 261-275.LI K Q, Li J W, CHANG X Y, et al. Principles and typical applications of cloud control system for intelligient and connected vehicles[J]. Journal of Automotive Safety And Engergy, 2020, 11(3): 261-275. (in Chinese) [9] LAMB M. Vehicle automation and highway infrastructure: driving positive change[J]. Highways, 2015, 84(2): 47-47. [10] CATAPULT T S. Future proofing infrastructure for connected and automated vehicles[R]. Milton Keynes: Transport Systems Catapult, 2017. [11] COLES C. Automated vehicles: a guide for planners and policymakers[D]. San Luis Obispo: California Polytechnic State University, 2016. [12] FARAH H, ERKENS S M, ALKIM T, et al. Infrastructure for automated and connected driving: state of the art and future research directions. In: Road Vehicle Automation 4[M]. Cham: Springer, 2018. [13] MA K, WANG H. Influence of exclusive lanes for connected and autonomous vehicles on freeway traffic flow[J]. IEEE Access, 2019, 7: 50168-50178. doi: 10.1109/ACCESS.2019.2910833 [14] LANHANG Y, TOSHIYUKI Y. Impact of dedicated lanes for connected and autonomous vehicle on traffic flow throughput[J]. Physica A: Statistical Mechanics and its Applications, 2018, 512, 15: 588-579. [15] ZHONG Z. Assessing the effectiveness of managed lane strategies for the rapid deployment of cooperative adaptive cruise control technology[D]. Newark: New Jersey Institute of Technology, 2018. [16] LI J. Impact of exclusive lanes for autonomous vehicles: a cost-benefit analysis of exclusive av lanes in eastern China[D]. Delft: Delft University of Technology, 2021. [17] VANDER LAAN Z, SADABADI K F. Operational performance of a congested corridor with lanes dedicated to autonomous vehicle traffic[J]. International Journal of Transportation Science and Technology, 2017, 6(1): 42-52. doi: 10.1016/j.ijtst.2017.05.006 [18] ZHANG J, WU K, CHENG M, et al. Safety evaluation for connected and autonomous vehicles' exclusive lanes considering penetrate ratios and impact of trucks using surrogate safety measures[J]. Journal of Advanced Transportation, 2020(2): 1-16. [19] RAHMAN M S, ABDEL-ATY M. Longitudinal safety evaluation of connected vehicles' platooning on expressways[J]. Accident Analysis and Prevention, 2018, 117: 381-391. doi: 10.1016/j.aap.2017.12.012 [20] HAMILTON B A, TECHNOLOGY N. Dedicating lanes for priority or exclusive use by connected and automated vehicles[M]. Washington, D.C. : The National Academies Press, 2018. [21] GHANIPOOR MACHIANI S, SOHRABI A, JAHANGIRI A. Impact of regular and narrow AV-exclusive lanes on manual driver behavior[R]. San Jose: Mineta Transportation Institute, 2020. [22] YANG D, FARAH H, SCHOENMAKERS M J, et al. Human drivers behavioural adaptation when driving next to a platoon of automated vehicles on a dedicated lane and implications on ttraffic flow[C]. 98th Annual Meeting of the Transportation Research Board, Washington, D.C., United States: National Academies of USA, 2019. [23] NICKKAR A, LEE Y J. Evaluation of dedicated lanes for automated vehicles at roundabouts with various flow patterns[C]. 98th Annual Meeting of the Transportation Research Board, Washington, D.C., United States: National Academies of USA, 2019. [24] CASSIDY M J, KIM K, NI W, et al. A problem of limited-access special lanes. part i: spatiotemporal studies of real freeway traffic[J]. Transportation Research Part A: Policy and Practice, 2015, 80: 307-319. doi: 10.1016/j.tra.2015.07.001 [25] CASSIDY M J, KIM K, NI W, et al. A problem of limited-access special lanes. part ii: exploring remedies via simulation[J]. Transportation Research Part A: Policy and Practice, 2015, 80: 320-329. doi: 10.1016/j.tra.2015.07.003 [26] VAN BEINUM A, BROEKMAN E, FARAH H, et al. Critical assessment of microscopic simulation models for simulating turbulence around motorway ramps[J]. Journal of Transportation Engineering, Part A: Systems, 2020, 146(2): 04019066. doi: 10.1061/JTEPBS.0000296 [27] HA P, CHEN S, DONG J, et al. Leveraging the capabilities of connected and autonomous vehicles and multi-agent reinforcement learning to mitigate highway bottleneck congestion[P/OL]. (2020-10-12)[2023-04-12]. http://arXivpreprintarXiv:2010.05436,2020 .[28] RAN B, LEIGHT S, CHANG B. A microscopic simulation model for merging control on a dedicated-lane automated highway system[J]. Transportation Research Part C: Emerging Technologies, 1999, 7: 369-388. doi: 10.1016/S0968-090X(99)00028-5 [29] KITAEJANG, CASSIDY M J. Dual influences on vehicle speed in special-use lanes and critique of us regulation[J]. Transportation Research Part A: Policy and Practice, 2012, 46(7): 1108-1123. doi: 10.1016/j.tra.2012.01.008 [30] JANG K, OUM S, CHAN C Y. Traffic characteristics of high-occupancy vehicle facilities[J]. Transportation Research Record: Journal of the Transportation Research Board, 2012, 2278(1): 180-193. doi: 10.3141/2278-20 [31] BORIBOONSOMSIN K, WU G, BARTH M. High occupancy vehicle(HOV)system analysis tools-district 8 HOV facility performance analysis[R], Sacramento, United States: California Department of Transportation Division of Research and Innovation, 2012. [32] WU G, BORIBOONSOMSIN K, BARTH M, et al. Different types of high-occupancy vehicle access control: comparative analysis of empirical capacities[J]. Transportation Research Record: Journal of the Transportation Research Board, 2015, 2484(1): 149-158. doi: 10.3141/2484-16 [33] SHAN X, HAO P, BORIBOONSOMSIN K, et al. Partially limited access control design for special-use freeway lanes[J]. Transportation Research Part A: Policy and Practice, 2018, 118: 25-37. doi: 10.1016/j.tra.2018.09.002 [34] IAN H, MIKE V. Best practices separation devices between toll lanes and free lanes[R]. Austin: Center for Transportation Research at The University of Texas at Austin, 2007. [35] COONER S C, RANFT S E. Safety evaluation of buffer-separatedhigh-occupancy vehicle lanes in Texas[J]. Journal of the Transportation Research Board, 2006, 1959: 168-177. doi: 10.1177/0361198106195900119 [36] SOLOMON D. Accidents on main rural highways related to speed[M]. US Department of Transportation, Federal Highway Administration, 1974. [37] VAN BEINUM A. Turbulence in traffic at motorway ramps and its impact on traffic operations and safety[D]. SWOV Institute for Road Safety Research, Delft Delft University of Technology, 2018. [38] ELEFTERIADOU L A. The highway capacity manual 6th edition: a guide for multimodal mobility analysis[J]. ITE journal, 2016, 86(4): 14-18. [39] GOLOB T F, RECKER W W, ALVAREZ V M. Freeway safety as a function of traffic flow[J]. Accident Analysis & Prevention, 2004, 36(6): 933-946. [40] VAN BEINUM A, HOVENGA M, KNOOP V, et al. Macroscopic traffic flow changes around ramps[J]. Transportmetrica A: Transport Science, 2017, 14(7): 598-614. [41] JANG K, KANG S, SEO J, et al. Cross-section designs for the safety performance of buffer-separated high-occupancy vehicle lanes[J]. Journal of Transportation Engineering, 2013, 139(3): 247-254. doi: 10.1061/(ASCE)TE.1943-5436.0000496 [42] GE J I, OROSZ G. Dynamics of connected vehicle systems with delayed acceleration feedback-sciencedirect[J]. Transportation Research Part C: Emerging Technologies, 2014, 46 (9): 46-64. [43] KHAN U, BASARAS P, SCHMIDT-THIEME L, et al. Analyzing cooperative lane change models for connected vehicles[C]. International Conference on Connected Vehicles & Expo(ICCVE), Vienna, Austria: IEEE, 2014. [44] RAZMI RAD S, FARAH H, TAALE H, et al. The Impact of a dedicated lane for connected and automated vehicles on the behaviour of drivers of manual vehicles[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2021, 82: 141-153. doi: 10.1016/j.trf.2021.08.010 [45] RUDIN-BROWN C, JAMSON S. Behavioural adaptation and road safety: theory, evidence and action[M]. New York: CRC Press, 2013. [46] RAHMATI Y, HOSSEINI M K, TALEBPOUR A, et al. Influence of autonomous vehicles on car-following behavior of human drivers[J]. Transportation Research Record: Journal of the Transportation Research Board, 2019, 2673(12): 367-379. doi: 10.1177/0361198119862628 [47] GOUY M, WIEDEMANN K, STEVENS A, et al. Driving next to automated vehicle platoons: how do short time headways influence non-platoon drivers'longitudinal control?[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2014, 27: 264-273. doi: 10.1016/j.trf.2014.03.003 [48] SCHOENMAKERS M, YANG D, FARAH H. Car-following behavioural adaptation when driving next to automated vehicles on a dedicated lane on motorways: a driving simulator study in the Netherlands[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2021, 78: 119-129. doi: 10.1016/j.trf.2021.01.010 [49] VOGEL K. A comparison of headway and time to collision as safety indicators[J]. Accident analysis & prevention, 2003, 35(3): 427-433. [50] 孙玲, 张静, 周瀛, 等. 车路协同环境下自动驾驶专用车道入口区域设计[J]. 公路交通科技, 2020, 37(S1): 122-129.SUN L, ZHANG J, ZHOU Y, et al. Design of entrance area of automatic driving special lane in vehicle-infrastructure collaborative environment[J]. Journal of Highway and Transportation Research and Development, 2020, 37(S1): 122-129. (in Chinese) [51] 徐东彬, 陈昕. 智慧高速公路演进及发展探究[J]. 中国交通信息化, 2022(1): 28-32, 43.XU D B, CHEN X. Research on the evolution and development of intelligent highway[J]. China ITS Journal, 2022(1): 28-32, 43. (in Chinese) -


 点击查看大图
点击查看大图
计量
- 文章访问数: 219
- HTML全文浏览量: 138
- PDF下载量: 31
- 被引次数: 0