

Characteristics and a Safety Analysis of Driver's Free Lane-changing Behavior in a Virtual Reality-based Connected Environment
-
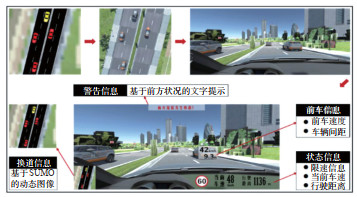
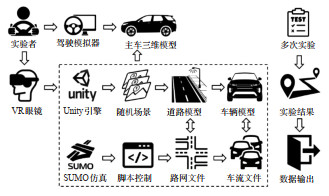
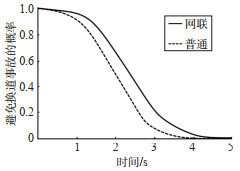
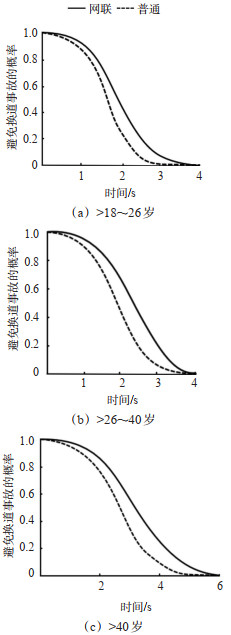
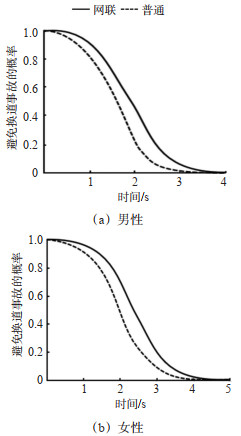
摘要: 传统驾驶模拟器难以精确模拟车联网环境中的复杂交互,如车速变化和车道变更。而连接虚拟现实(virtual reality,VR)的驾驶模拟器可以通过先进的传感器和实时数据处理,更逼真地还原车辆物理特性、交通流动态及实际道路环境。采用虚拟现实设备和驾驶模拟器,深入探索网联环境下的驾驶人自由换道行为与安全特征。基于交通仿真和三维建模技术搭建驾驶人自由换道实验系统,并建立自由换道场景库,进而开展驾驶人自由换道行为实验;基于广义估计方程建立驾驶人换道的间距选择模型和换道时间模型;基于加速失效模型分析网联环境对驾驶人自由换道行为的安全影响。研究结果表明:①网联环境下,女性驾驶人的自由换道间距与时间更长,年轻驾驶人的自由换道间距与时间更短;②每提高1 m/s2的加速度噪声,自由换道时的碰撞风险降低28%,每提高1 m的自由换道间距,自由换道时的碰撞风险增加1.1%;③年龄较大的驾驶人自由换道安全性更高,其中,中老年驾驶人(>40岁)自由换道时的碰撞时间(time-to-collision,TTC)比青年驾驶人(>27~40岁)、年轻驾驶人(>18~27岁)分别高38.3%,64.3%;④女性驾驶人比男性驾驶人自由换道安全性更高,女性驾驶人自由换道时的TTC比男性驾驶人高20.1%。与普通环境相比:①驾驶人在网联环境下自由换道间距增加1.16 m、换道时间增加2.41 s、换道安全水平提高19.72%;②自由换道事故发生概率随着碰撞风险持续时间增加而降低,其中,碰撞风险持续时间为1,2,3,4 s时,网联环境下的自由换道事故发生概率比普通环境下分别低5.8%,17.2%,14.4%,3.0%,且该概率在不同性别、年龄的驾驶人自由换道中差异显著。Abstract: Traditional driving simulators need help to accurately simulate complex interactions, such as speed variations and lane changes in connected vehicle environments. The connected virtual reality (VR) driving simulator can more realistically replicate vehicle physical characteristics, traffic flow dynamics, and actual road environments using advanced sensors and real-time data processing. A driving simulation system for free lane-changing experiments is developed using traffic simulation and 3D modeling technologies, based on which a scenario library is established and further carry out experiments about free lane-changing behavior. Generalized estimating equations is adopted to establish models of gap selection and lane-changing time. An accelerated failure time model is adopted to analyze the safety impact of the connected environment on free lane-changing behavior. The results can be concluded in two aspects. In connected environments: ① Female drivers exhibit longer lane-changing gaps and need more time. Younger drivers show shorter gaps and need less time. ②An increase of 1 m/s2 in acceleration noise can reduce collision risk by 28% during lane changes, and a 1 m increase in lane-changing gap can increase collision risk by 1.1%.③Older drivers have a higher level of lane-changing safety. Middle-aged and elderly drivers (> 40 years old) show 38.3% and 64.3% higher regarding time-to-collision (TTC) than young (> 27~40 years old) and younger drivers (> 18~27 years old) do. ④Female drivers have a higher level of lane-changing safety than male drivers do, with a 20.1% higher of TTC during free lane-changes. Compared to non-connected environments: ①Drivers in connected environments show a 1.16 m increase in lane-changing gap, a 2.41 s increase in lane-changing time and a 19.72% improvement in the level of safety. ②The probability of occurring lane-changing accidents decreases with the increase of collision risk durations. Specifically, it reduces by 5.8%, 17.2%, 14.4%, and 3.0% at 1, 2, 3, and 4 s of collision risk duration, respectively. These probabilities vary significantly across drivers'genders and ages.
-

图 8 自由换道不同驾驶状态的生存曲线
Figure 8. The survival curves of free lane-changing under different driving conditions

图 9 自由换道不同年龄驾驶人的生存曲线
Figure 9. The survival curves of free lane-changing for different age groups

图 10 自由换道不同性别驾驶人的生存曲线
Figure 10. The survival curves of free lane-changing for different genders
表 1 20号实验者换道实验数据
Table 1. The lane-changing experiment data from participant number 20
速度(/km/h) 普通环境 41 速度(/km/h) 普通环境 41 网联环境 43 当前车道前车间距/m 普通环境 45 网联环境 51 加速度噪声(/m/s) 普通环境 0.9 网联环境 0.8 目标车道后车间距/m 普通环境 33 网联环境 30 距离冲突时间TTC/s 普通环境 5 网联环境 7 换道持续时间/s 普通环境 7 网联环境 8  下载: 导出CSV
下载: 导出CSV
表 2 广义估计方程的自变量统计
Table 2. Explanatory variables statistics for generalized estimating equations
指标 变量 变量赋值 计数 占比/% 驾驶状态 普通环境 普通环境为1,否则为0 51 50.0 网联环境 网联环境为1,否则为0 51 50.0 速度(/km/h) 在换道行为期间的平均速度 驾驶参数 加速度噪声/(m/s) 换道开始点至执行点间的加速度标准差 换道间距选择/% 实验者选择换道间隙的情况 年龄/岁 >18~27(年轻) 实验者是年轻为1,否则为0 18 25.3 >27~40(青年) 实验者是青年为1,否则为0 26 51.0 > 40(中老年) 实验者是中老年为1,否则为0 7 13.7 性别 男 实验者性别男为1,否则为0 32 62.7 女 实验者性别女为1,否则为0 19 37.3
下载: 导出CSV
表 3 自由换道GEE间距选择模型分析结果
Table 3. The analysis results of the GEE model for free lane-changing distance selection
模型 变量 系数Wald卡方值 显著性 间距选择模型 常数 3.08 219.25 < 0.001 网联环境(参照:普通环境) 1.16 5.64 0.013 速度 0.08 26.39 0.052 加速度噪声 -0.19 5.26 0.038 年龄:年轻(参照:青年) -0.17 4.18 < 0.001 年龄:中老年(参照:青年) 0.23 4.02 0.036 性别:女(参照:男) 0.15 3.97 0.029 Alpha 0.26
下载: 导出CSV
表 4 自由换道GEE换道时间模型分析结果
Table 4. The analysis results of the GEE lane-changing time model for free lane-changing
模型 变量 系数 Wald卡方值显著性 换道时间模型 常数 3.92 7.03 0.009 网联环境(参照:普通环境) 2.41 5.94 0.014 速度 0.15 4.06 0.038 换道间距 0.04 8.82 0.005 年龄:年轻(参照:青年) -1.97 3.79 0.047 年龄:中老年(参照:青年) 3.41 14.05 < 0.001 性别:女(参照:男) 2.54 4.63 0.06 Alpha 0.46
下载: 导出CSV
表 5 自由换道加速失效模型拟合结果
Table 5. The fitting results of the free lane-changing acceleration failure model
变量 系数 z 显著性exp(β) exp(β) 95%置信区间 上限 下限 常数 0.49 2.16 0.026 / / / 网联环境 0.18 1.98 0.042 1.23 1.846 2.108 加速度噪声 -0.22 -2.39 0.031 0.69 1.857 2.063 换道间距 0.011 4.15 0.004 1.03 1.792 2.034 年龄:年轻 -0.23 2.14 0.027 0.78 1.814 2.036 年龄:中老年 0.32 2.39 0.022 1.34 1.773 2.139 性别:男 -0.19 -2.13 0.031 0.81 1.876 2.043 P 3.16 0.875 3.065 θ 0.73 1.856 2.084 LL(0) -72.36 $ L L(\hat{\beta})$ -42.58 似然比统计 57.13 AIC 93
下载: 导出CSV
-
[1] SHAWKY M. Factors affecting lane change crashes[J]. IATSS Research, 2020, 44(2): 155-161. doi: 10.1016/j.iatssr.2019.12.002 [2] 陈峥, 张玉果, 沈世全, 等. 城市郊区道路跟车条件下智能网联汽车速度规划[J]. 中国公路学报, 2023, 36(6): 298-310.CHEN Z, ZHANG Y G, SHEN S Q, et al. Speed planning for intelligent connected vehicles under car-following conditions on suburban roads[J]. China Journal of Highway and Transport, 2023, 36(6): 298-310. (in Chinese) [3] 王云泽, 李英杰, 唐立. 交通运输从业者对自动驾驶接受度建模与分析[J]. 交通运输工程与信息学报, 2023, 21(2): 42-54.WANG Y Z, LI Y J, TANG L. Modeling and analysis of the acceptance of autonomous driving by transportation practitioners[J]. Journal of Transportation Engineering and Information, 2023, 21(2): 42-54. (in Chinese) [4] 翟俊达, 鲁光泉, 陈发城, 等. 城市交叉口车路网联信息对青年驾驶人驾驶行为的影响分析[J]. 交通信息与安全, 2022, 40(1): 126-134. doi: 10.3963/j.jssn.1674-4861.2022.01.015ZHAI J D, LU G Q, CHEN F C, et al. Effects of information from connected vehicles and infrastructure on driving behavior of young drivers at urban intersections[J]. Journal of Transport Information and Safety, 2022, 40(1): 126-134. (in Chinese) doi: 10.3963/j.jssn.1674-4861.2022.01.015 [5] GIPPS P G. A model for the structure of lane-changing decisions[J]. Transportation Research Part B: Methodological, 1986, 20(5): 403-414. doi: 10.1016/0191-2615(86)90012-3 [6] WU J, BRACKSTONE M, MCDONALD M. Fuzzy sets and systems for a motorway microscopic simulation model[J]. Fuzzy Sets and Systems, 2000, 116(1): 65-76. doi: 10.1016/S0165-0114(99)00038-X [7] ZHENG Z. Recent developments and research needs in modeling lane changing[J]. Transportation Research Part B: Methodological, 2014, 60(11): 16-32. [8] PAN T L, LAM W H K, SUMALEE A, et al. Modeling the impacts of mandatory and discretionary lane-changing maneuvers[J]. Transportation Research Part C: Emerging Technologies, 2016, 68(5): 403-424. [9] JULA H, KOSMATOPOULOS E B, IOANNOU P A. Collision avoidance analysis for lane changing and merging[J]. IEEE Transactions on Vehicular Technology, 2000, 49(6): 2295-2308. doi: 10.1109/25.901899 [10] NARANJO J E, GONZÁLEZ C, GARCÍA R, et al. Cooperative throttle and brake fuzzy control for ACC + Stop & Go maneuvers[J]. IEEE Transactions on Vehicular Technology, 2007, 56(4): 1623-1630. doi: 10.1109/TVT.2007.897632 [11] BARMPOUNAKIS E N, VLAHOGIANNI E I, GOLIAS J C. Decision trees and meta-algorithms for revealing powered two wheelers' overtaking patterns[R]. Washington, D.C. Transportation Research Board, 2017. [12] 周红媚, 孙叶, 徐秀娟. 基于随机效用理论的城市道路车辆自由换道行为研究[J]. 交通运输研究, 2017, 3(2): 9-16.ZHOU H M, SUN Y, XU X J. Behavior of discretionary lane changing on urban streets based on random utility theory[J]. Transportation Research, 2017, 3(2): 9-16. (in Chinese) [13] 王婉秋, 肖凌云, 马明辉, 等. 基于NSGA_Ⅱ的双车道公路弯道驾驶人模型[J]. 公路交通科技, 2021, 38(12): 131-138, 146.WANG W Q, XIAO L Y, MA M H, et al. Driver models in curves of two-lane highway based on NSGA_Ⅱ[J]. Journal of Highway and Transportation Research and Development, 2021, 38(12): 131-138, 146. (in Chinese) [14] 田勇达. 混流环境下网联车辆换道模型研究[D]. 长春: 吉林大学, 2020.TIAN Y D. Research on lane change model of connected vehicles in mixed traffic environments[D]. Changchun: Jilin University, 2020. (in Chinese) [15] 刘怿轩, 张慧永, 王猛, 等. 跟驰自动驾驶车时人驾车行为研究: 实证与建模[J]. 交通运输工程与信息学报, 2023, 21 (2): 14-28.LIU Y X, ZHANG H Y, WANG M, et al. Study on human driving behavior during car-following autonomous driving: empirical and modeling[J]. Journal of Transportation Engineering and Information, 2023, 21(2): 14-28. (in Chinese) [16] 张顺, 陈焕明, 孙腾超. 车联网环境与传统环境下智能车辆换道博弈模型[J]. 汽车实用技术, 2024, 49(9): 35-42.ZHANG S, CHEN H M, SUN T C. Lane-changing game model of intelligent vehicle in vehicle networking environment and traditional environment[J]. Automobile Technology, 2024, 49(9): 35-42. (in Chinese) [17] 涂辉招, 李振飞, 孙立军. 驾驶模拟器运动系统对自由驾驶行为的影响分析[J]. 同济大学学报(自然科学版), 2015, 43 (11): 1696-1702.TU H Z, LI Z F, SUN L J. Analysis of the impact of driving simulator motion systems on free driving behavior[J]. Journal of Tongji University(Natural Science), 2015, 43(11): 1696-1702. (in Chinese) [18] SHARMA A, ALI Y, SAIFUZZAMAN M, et al. Human factors in modelling mixed traffic of traditional, connected, and automated vehicles[C]. International Conference on Applied Human Factors and Ergonomics, Los Angeles, USA: Springer International Publishing, 2018. [19] ALI Y, ZHENG Z, HAQUE M M. Connectivity's impact on mandatory lane-changing behaviour: Evidences from a driving simulator study[J]. Transportation Research Part C: Emerging Technologies, 2018, 93: 292-309. doi: 10.1016/j.trc.2018.06.008 [20] LEE J, PARK B. Development and evaluation of a cooperative vehicle intersection control algorithm under the connected vehicles environment[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(1): 81-90. doi: 10.1109/TITS.2011.2178836 [21] RUDIN-BROWN C M, NOY Y I. Investigation of behavioral adaptation to lane departure warnings[J]. Transportation Research Record, 2002, 1803(1): 30-37. doi: 10.3141/1803-05 [22] RUDIN-BROWN, C, JAMSON, S. Behavioural adaptation and road safety: theory, evidence and action[M]. Boca Raton: CRC Press, 2013. [23] ALI Y, ZHENG Z, HAQUE M M, et al. Understanding the discretionary lane-changing behaviour in the connected environment[J]. Accident Analysis & Prevention, 2020, 137: 105463. [24] ADELL E, VÁRHELYI A, DALLA FONTANA M. The effects of a driver assistance system for safe speed and safe distance-a real-life field study[J]. Transportation Research Part C: Emerging Technologies, 2011, 19(1): 145-155. doi: 10.1016/j.trc.2010.04.006 [25] SAFFARIAN M, DE WINTER J C F, HAPPEE R. Enhancing driver car-following performance with a distance and acceleration display[J]. IEEE Transactions on Human-machine Systems, 2012, 43(1): 8-16. [26] MONTGOMERY J, KUSANO K D, GABLER H C. Age and gender differences in time to collision at braking from the 100-car naturalistic driving study[J]. Traffic Injury Prevention, 2014, 15(1): 15-20. [27] LI Y, LI Z, WANG H, et al. Evaluating the safety impact of adaptive cruise control in traffic oscillations on freeways[J]. Accident Analysis & Prevention, 2017, 104: 137-145. [28] LI Y, WANG H, WANG W, et al. Evaluation of the impacts of cooperative adaptive cruise control on reducing rear-end collision risks on freeways[J]. Accident Analysis & Prevention, 2017, 98: 87-95. [29] GU X, ABDEL-ATY M, XIANG Q, et al. Utilizing UAV video data for in-depth analysis of drivers' crash risk at interchange merging areas[J]. Accident Analysis & Prevention, 2019, 123: 159-169. [30] YOUNG K L, REGAN M A, MITSOPOULOS E. Acceptability to young drivers of in-vehicle intelligent transport systems[J]. Road & Transport Research, 2004, 13(2): 6-7. [31] DONMEZ B, BOYLE L N, LEE J D, et al. Drivers'attitudes toward imperfect distraction mitigation strategies[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2006, 9(6): 387-398. doi: 10.1016/j.trf.2006.02.001 [32] GISH J A, GRENIER A, VRKLJAN B, et al. Older people driving a high-tech automobile: Emergent driving routines and new relationships with driving[J]. Canadian Journal of Communication, 2017, 42(2): 235-236. doi: 10.22230/cjc.2017v42n2a3125 [33] LI G, EBEN LI S, CHENG B. Field operational test of advanced driver assistance systems in typical Chinese road conditions: the influence of driver gender, age and aggression[J]. International Journal of Automotive Technology, 2015, 16(5): 739-750. doi: 10.1007/s12239-015-0075-5 -




 点击查看大图
点击查看大图

计量
- 文章访问数: 170
- HTML全文浏览量: 114
- PDF下载量: 18
- 被引次数: 0