

Multi-scale Protected Zone Models and an Improved Velocity Obstacle Method for Aircraft Swarms
-
摘要: 针对高密度空域中所呈现出的航空器集群现象,研究了1种面向航空器集群的多尺度保护区模型与改进速度障碍法。对比传统单一航空器保护区模型及其速度障碍法存在计算复杂、实时性低等问题,研究了面向航空器的动态椭圆保护区模型以及面向航空器集群的融合保护区模型,在更加精确地刻画单一航空器的飞行状态和安全间隔的同时,创新地实现了由单一航空器保护区向航空器集群保护区的几何变换。所提出的航空器集群保护区模型在融合集群安全间隔特征和运动特征的同时显著降低了模型的特征维度。此外,在多尺度保护区模型的基础上提出了改进速度障碍法,并加入了基于航空器集群的速度障碍边界,降低了算法的计算复杂性。研究模型和算法可以将多航空器刻画为航空器集群,基于航空器集群的实时速度和航向调整边界,在大幅降低计算复杂性的基础上,实现了面向航空器集群的冲突探测与解脱航迹输出。通过仿真实验将本文方法与传统方法进行对比,结果表明:本文方法有效优化了航空器集群的冲突判定机制,将算法所需的计算时间缩短了33%,同时使完成冲突解脱的平均调整幅度降低了60.45%,有效提升了集群现象下的航空器冲突探测与解脱效率。Abstract: The thesis explores aircraft swarming in dense airspace. A multi-scale protected zone model, coupled with an improved velocity obstacle method, is proposed to solve this. Traditional approaches often rely on a single-aircraft protected zone model, which utilizes a velocity obstacle method characterized by complex calculations and suboptimal real-time performance. In contrast, a more advanced approach is introduced, featuring a dynamic ellipsoidal protected zone model and a fusion protected zone model specifically designed for aircraft swarms. These models are crafted to accurately depict the aircraft's flight state and safety intervals. Moreover, the work pioneers the geometric transformation from a single-aircraft protected zone to a swarm-based protected zone. The innovative aircraft swarm protected zone model reduces the dimensional complexity while integrating critical features such as swarm safety intervals and motion characteristics. The paper further develops an improved velocity obstacle method that is grounded on the multi-scale protected zone model. This refined method incorporates a velocity obstacle boundary specifically tailored for aircraft swarms, effectively reducing the computational demands of the algorithm. The proposed models and algorithms successfully portray multiple aircraft as swarms. By establishing boundaries for real-time adjustments in speed and direction specifically for aircraft swarms, they significantly reduce computational complexity. This effectively implements conflict detection and resolution trajectories for aircraft swarms. A comparison of the proposed method with conventional approaches shows a significant improvement in the conflict determination mechanism for aircraft clusters, reducing algorithm computation time by 33%. Additionally, the proposed method leads to a decrease in adjustment amplitude by 60.45%, enhancing its overall performance. The method effectively enhances the efficiency of aircraft conflict detection and resolution under swarming phenomena.
-

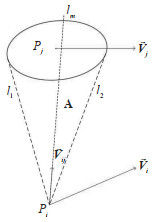
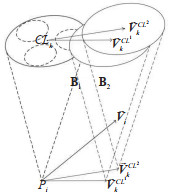
图 5 沿$ \vec{\boldsymbol{V}}_j$平移后的速度障碍模型
Figure 5. Model of the VO after translation along $ \vec{\boldsymbol{V}}_j$

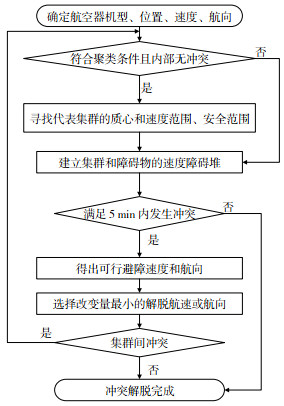
图 9 面向航空器集群的改进速度障碍法冲突解脱流程
Figure 9. Improved VO method conflict resolution process for aircraft swarms
表 1 3组不同机型航空器位姿信息
Table 1. Position information of three groups of aircraft of different types
实验组 模型 航空器i机型 (xj,yj)/km aj /km bj /km θj /° $ \left|\vec{\boldsymbol{V}}_i\right| /(\mathrm{km} / \mathrm{min})$ 航空器j机型 (xj,yj)/km aj /km bj /km θj /° $ \left|\vec{\boldsymbol{V}}_i\right| /(\mathrm{km} / \mathrm{min})$ 1 动态 Cessna172 (70,65) 1.51 0.79 50 3.77 DA40 (50,90) 1.81 0.93 5 4.53 传统 Cessna172 (70,65) 5.00 5.00 50 3.77 DA40 (50,90) 5.00 5.00 5 4.53 2 动态 B737-800 (265,260) 3.67 3.01 135 9.17 DA40 (250,300) 1.81 0.93 180 4.53 传统 B737-800 (265,260) 5.00 5.00 135 9.17 DA40 (250,300) 5.00 5.00 180 4.53 3 动态 A320 (50,50) 3.60 3.00 20 9 B737-800 (70,90) 3.67 3.01 280 9.17 传统 A320 (50,50) 5.00 5.00 20 9 B737-800 (70,90) 5.00 5.00 280 9.17  下载: 导出CSV
下载: 导出CSV
表 2 传统保护区与动态椭圆保护区模型对比
Table 2. Comparison of traditional and dynamic elliptical protected zone models
实验组 模型 $ \left|\boldsymbol{V}_i^{\prime}\right| /(\mathrm{km} / \mathrm{min})$ $ \left|\boldsymbol{V}_i^{\prime \prime}\right| /(\mathrm{km} / \mathrm{min})$ θ′i/° θi′′ /° 最小解脱速度差/(km/min) 最大解脱速度差/(km/min) 最小解脱航向差/(km/min) 最大解脱航向差/(km/min) 1 动态 3.56 4.17 23.39 63.98 0.21 0.40 26.61 13.98 传统 2.82 5.02 14.77 98.95 0.95 1.25 35.23 48.95 2 动态 8.39 13.38 132.01 143.51 0.78 4.21 2.99 8.51 传统 7.31 19.83 126.38 148.24 1.86 10.66 8.62 13.24 3 动态 5.58 11.37 8.61 42.52 3.42 2.37 11.39 22.52 传统 4.42 13.73 -0.26 52.24 4.58 4.73 20.26 32.24
下载: 导出CSV
表 3 航空器位姿信息
Table 3. Aircraft position information
序号 机型 (xi,yi)/km ai /km bi /km θi /(°) Vi /(km/min) 1 A320 (30,90) 3.60 3.00 0 9.00 2 A320 (38,90) 3.50 3.00 -5 8.74 3 A320 (30,98) 3.32 3.00 1 8.30 4 Cessna172 (70,80) 1.51 0.79 110 3.77
下载: 导出CSV
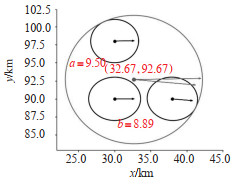
表 4 航空器集群位姿信息
Table 4. Aircraft swarm position information
集群信息 参数值 (Xk,Yk)/km (32.67,92.67) ak/km 9.50 bk/km 8.89 θk/° [-5,1] $ \left|\vec{\boldsymbol{V}}_k^{C L}\right| /(\mathrm{km} / \mathrm{min})$ [8.3,9]
下载: 导出CSV
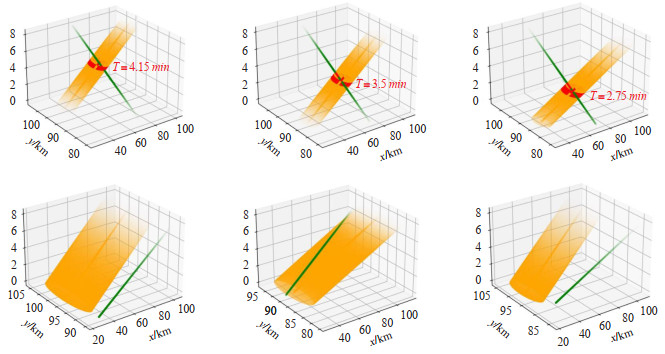
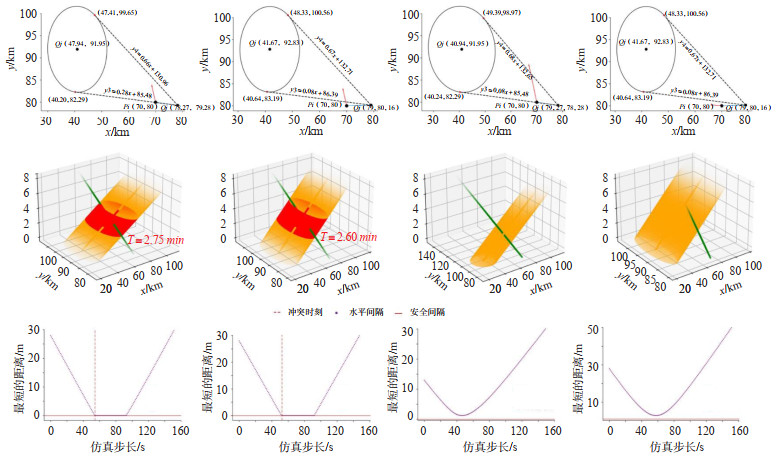
表 5 障碍航空器解脱策略
Table 5. Obstacle aircraft relief strategies
集群 T/min $\left|\boldsymbol{V}_i^{\prime}\right| /(\mathrm{km} / \mathrm{min})$ $\left|\boldsymbol{V}_i^{\prime \prime}\right| /(\mathrm{km} / \mathrm{min})$ θ′i/° θ′′i/° 集群左下边界 2.75 - 6.63 -5.56 176.49 集群右上边界 2.60 0.95 8.63 8.75 162.23
下载: 导出CSV
-
[1] 吴闯洋, 胡小兵, 马霁. 基于涟漪扩散算法的航空器滑行路径优化[J]. 计算机仿真, 2023, 40(12): 87-92.WU C Y, HU X B, MA J. Aircraft glide path optimisation based on ripple diffusion algorithm[J]. Computer Simulation, 2023, 40(12): 87-92. (in Chinese) [2] 李萌. TBO模式下航空器四维航迹规划技术[D]. 唐山: 华北理工大学, 2022.LI M. Aircraft four-dimensional trajectory planning technology in TBO mode[D]. Tangshan: North China University of Science and Technology, 2022. (in Chinese) [3] 穆朝絮, 张勇, 余瑶, 等. 基于自适应动态规划的航空航天飞行器鲁棒控制研究综述[J]. 空间控制技术与应用, 2019, 45(4): 71-79.MU C X, ZHANG Y, YU Y, et al. Review of research on robust control of aerospace vehicles based on adaptive dynamic programming[J]. Space Control Technology and Applications, 2019, 45(4): 71-79. (in Chinese) [4] 徐文钰, 敖海跃, 刘燕斌. 基于鸽群优化算法的多无人机局部航迹重规划[J]. 战术导弹技术, 2022(1): 46-52.XU W Y, AO H Y, LIU Y B. Multi-UAV local trace replanning based on pigeon swarm optimization algorithm[J]. Tactical Missile Technology, 2022(1): 46-52. (in Chinese) [5] 王海瑶, 安天洋. 基于Gmapping和A*算法的运输机器人系统的设计[J]. 工业控制计算机, 2024, 37(1): 19-21.WANG H Y, AN T Y. Design of transport robot system based on Gmapping and A* algorithm[J]. Industrial Control Computer, 2024, 37(1): 19-21. (in Chinese) [6] 毕可心, 吴明功, 温祥西, 等. 基于飞行冲突网络和遗传算法的冲突解脱策略[J]. 系统工程与电子技术, 2023, 45 (5): 1429-1440.BIKX, WUMG, WEN XX, et al. Flight conflictresolution strategy based on complex networks[J]. Systems Engineering and Electronic Technology, 2023, 45(5): 1429-1440. (in Chinese) [7] 陈可嘉, 陈琳琳. 基于改进人工势场法的动态改航规划[J]. 飞行力学, 2020, 38(5): 84-89.CHEN K J, CHEN L L. Dynamic diversion planning based on improved artificial potential field method[J]. Flight Mechanics, 2020, 38(5): 84-89. (in Chinese) [8] 夏红伟, 李秋实, 李莉, 等. 基于hp自适应伪谱法的飞行器再入轨迹优化与制导[J]. 中国惯性技术学报, 2015, 23(6): 818-823.XIA H W, LI Q S, LI L, et al. Aircraft re-entry trajectory optimization and guidance based on hp adaptive pseudo spectral method[J]. Chinese Journal of Inertial Technology, 2015, 23 (6): 818-823. (in Chinese) [9] 高宇, 霍静, 李文斌, 等. 基于路径规划特点的语义目标导航方法[J]. 智能系统学报, 2024, 19(1): 217-227.GAO Y, HUO J, LI W B, et al. A semantic target navigation method based on path planning features[J]. Journal of Intelligent Systems, 2024, 19(1): 217-227. (in Chinese) [10] WANG T, LI A, GUO D, et al. Global dynamic path planning of AGV based on fusion of improved A* algorithm and dynamic window method[J]. Sensors, 2024, 24(6): 2011. doi: 10.3390/s24062011 [11] JO H J, KIM S R, KIM J H, et al. Comparison of velocity obstacle and artificial potential field methods for collision avoidance in swarm operation of unmanned surface vehicles[J]. Journal of Marine Science and Engineering, 2022, 10(12): 2036. doi: 10.3390/jmse10122036 [12] 王宏伟, 甘旭升, 韦刚, 等. 针对动态障碍物的无人机最优避撞策略[J]. 电光与控制, 2022, 29(3): 33-37.WANG H W, GAN X S, WEI G, et al. Optimal collision avoidance strategy for UAVs to dynamic obstacles[J]. Electro Optics and Control, 2022, 29(3): 33-37. (in Chinese) [13] 高扬, 郭钒, 陈靖淞, 等. 融合空域无人机与有人机冲突风险预测与解脱[J]. 安全与环境学报, 2022, 22(6): 3288-3294.GAO Y, GUO F, CHEN J S, et al. Conflict prediction and relief between UAV and manned aircraft in fusion airspace[J]. Journal of Safety and Environment, 2022, 22(6): 3288-3294. (in Chinese) [14] 夏生吉, 王道波, 罗东海, 等. 无人机跟踪过程中的避障问题研究[J]. 机械与电子, 2022, 40(11): 61-65, 70.XIA S J, WANG D B, LUO D H, et al. Research on obstacle avoidance in UAV tracking processes[J]. Mechanical and Electronic, 2022, 40(11): 61-65, 70. (in Chinese) [15] SUY, LUO J, ZHUANG J, et al. A constrained locking sweeping method and velocity obstacle based path planning algorithm for unmanned surface vehicles in complex maritime traffic scenarios[J]. Ocean Engineering, 2023, 279: 113538. doi: 10.1016/j.oceaneng.2022.113538 [16] XUE D, WU D, YAMASHITA A S, et al. Proximal policy optimization with reciprocal velocity obstacle based collision avoidance path planning for multi-unmanned surface vehicles[J]. Ocean Engineering, 2023, 273: 114005. doi: 10.1016/j.oceaneng.2023.114005 [17] 黄永龙, 仲训昱. 基于改进速度障碍法的多机器人避碰规划算法[J]. 计算机工程与应用, 2012, 48(32): 47-51, 207HUANG Y L, ZHONG X Y. Improved velocity obstacles-based collision avoidance algorithm for multiple mobile robots[J]. Computer Engineering and Applications, 2012, 48 (32): 47-51, 207. (in Chinese) [18] ZHENG H, ZHU J, LIU C, et al. Regulation aware dynamic path planning for intelligent ships with uncertain velocity obstacles[J]. Ocean Engineering, 2023, 278: 114401. doi: 10.1016/j.oceaneng.2023.114401 [19] 郭华, 郭小和. 改进速度障碍法的无人机局部路径规划算法[J]. 航空学报, 2023, 44(11): 271-281.GUO H, GUO X H. Localized path planning algorithm for unmanned aerial vehicles with improved velocity barrier method[J]. Journal of Aeronautics, 2023, 44(11): 271-281. (in Chinese) [20] 童亮, 甘旭升, 张宏宏, 等. 考虑多因素影响的无人机碰撞风险评估[J]. 兵器装备工程学报, 2023, 44(4): 282-289.TONG L, GAN X S, ZHANG H H, et al. Risk assessment of UAV collision considering multiple factors[J]. Journal of Ordnance Equipment Engineering, Journal of Ordnance Equipment Engineering, 2023, 44(4): 282-289. (in Chinese) [21] 彭娅婷, 温祥西, 吴明功, 等. TBO模式下基于复杂网络的空中交通复杂性分析[J]. 北京航空航天大学学报, 2023: 1-17.PENG Y T, WEN X X, WU M G, etc. Complexity analysis of air traffic based on complex network under TBO mode[J]. Journal of Beihang University, 2023: 1-17. (in Chinese) [22] 郭钒. 融合空域大型固定翼无人机冲突风险预测与解脱[D]. 天津: 中国民航大学, 2022.Guo F. Conflict risk prediction and resolution for large fixed-wing UAVs in converged airspace[D]. Tianjin: Civil Aviation University of China, 2022. (in Chinese) -


 点击查看大图
点击查看大图
计量
- 文章访问数: 184
- HTML全文浏览量: 138
- PDF下载量: 15
- 被引次数: 0